一个控制系统的稳定性定义为当一个有界输入应用于它时,任何系统能够提供一个有界输出的能力。更具体地说,我们可以说,稳定性允许系统达到稳定状态并且在特定的输入下保持这个状态即使系统的参数发生了变化。
稳定性被认为是控制系统的重要特性。它也被称为系统达到稳态的能力。
由于它是一个重要的特征,因此控制系统的性能显示出高依赖性的稳定性。
介绍
我们已经研究过控制系统,控制系统的各个单元联合工作,以提供系统的特定输出。
为了获得指定的输出,必须控制系统的各种参数。除此之外,系统必须足够稳定,以便输出不受系统或干扰参数的不良变化的影响。
因此我们可以说,设计一个稳定的系统,使系统的响应不会随系统参数的变化而发生任何不可容忍的变化。
这里需要注意的是,稳定或不稳定是控制系统的特性,因此取决于闭环系统的极点。
因此,我们可以说稳定性是系统的一个因子,它与系统的输入无关。然而,系统的稳态输出依赖于应用输入的极点。
控制系统稳定性
我们已经讨论过稳定的系统为有界输入产生有界输出(BIBO)。
现在问题来了什么是有界信号?
信号的有界值表示有限值。更具体地,我们可以说,有界信号保持最大值和最小值的有限值。因此,如果任何信号的Maxima和最小值是有限的,那么这意味着最大值和最小值之间的所有其他值也将是有限的。
假设我们有一个信号如下所示:

正如我们所看到的,上述信号的最大值和最小值是有限的。因此,这样的信号被称为有界的,如果这样的输出是由一个系统提供的,那么它被称为一个稳定系统。
因此,反过来说,当应用的输入在本质上是有界的时候,一个不稳定系统提供了一个无界的输出。
现在,什么是无限的信号?
因此,通常,其曲线图显示连续上升的信号,从而显示诸如斜坡信号的无限值被称为无界信号。下图所示的图形表示无限的信号:

有时候我们遇到了渐近稳定的系统当输入不存在时,即使系统的参数发生变化,其输出进程为0的系统。
在这里指出的是杆子的杆子转换功能,是定义控制系统稳定性的因素。
现在出现问题,波尔斯如何提供有关系统稳定性的信息?
- 当系统的传递函数的极点位于S平面的左侧时,据说据说是稳定的系统。然而,随着极点朝向0或原点的进展,然后,在这种情况下,系统的稳定性降低。
- 现在存在在假想轴上存在的杆的两个条件:

- 如果对于一个系统,极点存在于虚轴上并且本质上是非重复的,那么我们称它为a边缘稳定的系统。
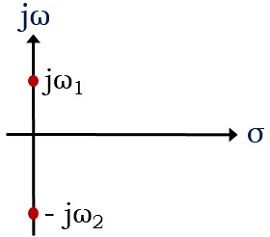
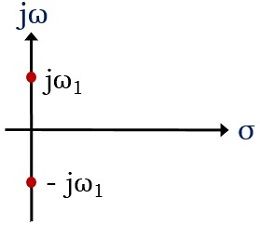
- 但是,如果在S平面的虚轴中存在重复极。然后被称为一个不稳定的系统。


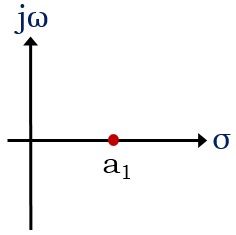
- 如果系统在S平面的右侧域中具有极点的系统,则这种系统称为不稳定的系统。右半部中甚至是单极的存在使得系统不稳定。
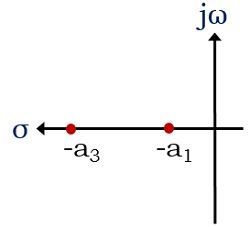
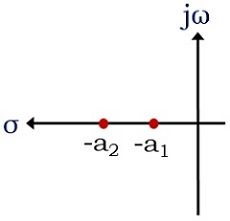
- 据说靠近原点附近的杆子主导杆。因此,如果一个稳定的系统具有杆 - a1而且-a.2然后,然后--a1被认为是该特定系统的主导极点。


- 如果一个系统的输出不接近0,那么它就被认为是一个不稳定的系统,因此即使在没有输入的情况下也表示某个值。
因此,我们可以说,在S平面中的极点的位置对应于系统的稳定性。
稳定系统的类型
- 绝对稳定的系统:绝对稳定的系统是即使在系统的参数中的变化也提供有限输出的系统。这意味着它是这样的系统,其输出在达到稳态之后不显示系统参数值中的干扰或变化而不断变化。
下图表示绝对稳定系统的阶跃响应:

绝对稳定条件的极点的性质必须是真实的和负面的。
下图表示不稳定的系统:

- 有条件稳定的系统:有条件稳定的系统为界限输出提供由系统参数定义的系统的唯一特定条件。
因此,我们可以在这里说该系统仅在特定条件下表现出稳定性。
如果违反该特定条件,则系统会生成无限的输出。
- 略微/批判性稳定的系统:边际稳定系统是指当给它提供有界输入时,产生一个频率和幅值恒定的振荡信号的系统。
这些振荡被称为持续振荡。这里的图代表了边缘稳定系统的步骤响应:

闭环磁极的性质必须是非重复性的并且位于假想轴上。
以这种方式,研究了控制系统的稳定性。
留下一个回复